1. Physical AI 팀, Lab에서 시작된 도전
Physical AI
지난 5월 코엑스에서 열린 ‘2026 국제인공지능대전(AI Expo Korea)’. 제논은 자체 생성형 AI 플랫폼인 GenOS를 필두로 GenA, GenD, One Agent 등 핵심 솔루션을 대거 선보였습니다.
그중에서도 단연 관람객들의 이목을 사로잡은 하이라이트는 제논의 Physical AI 팀이 최초로 공개한 시니어케어 로봇, ‘젠피(GenP)’였습니다. 요양 병원 환경을 그대로 재현한 공간에서 환자 돌봄 시나리오를 실시간으로 시연해 냈기 때문입니다. 이는 제논이 피지컬 AI를 단순한 기술 로드맵이 아닌, 실제 비즈니스 문제를 해결하는 강력한 수단으로 증명해 낸 순간이기도 했습니다.
앞선 현장 스케치에서 엑스포 전반의 뜨거웠던 분위기를 전해드렸다면, 이번 포스트에서는 렌즈를 조금 더 가까이 들이대 보려고 합니다. Physical AI 팀이 처음부터 꿈꿨던 목표는 무엇이었는지, 준비 과정에서 마주한 수많은 문제들을 어떻게 풀어나갔는지, 그리고 앞으로 어떤 미래를 그려나갈지— 젠피의 치열했던 무대 뒤 비하인드 스토리를 지금 공개합니다.

젠피를 엑스포에 선보이기까지의 준비 기간은 약 3개월로, 매우 도전적인 일정이었습니다. 지난 2월 로봇을 처음 인도받은 후 5월 초 전시를 목표로 움직여야 했기 때문입니다. 제논의 피지컬AI랩은 2026년 초에 설립되었기 때문에 휴머노이드 하드웨어 경험이 제한적이었는데, 짧은 시간 내에 극복해야 할 과제도 많았습니다.
이 짧고도 강렬했던 개발 과정을 크게 보행, 내비게이션, 조작, 그리고 통합의 네 가지 파트로 나누어 소개합니다. 복잡한 기술적 깊이보다는, 제한된 시간 속에서 팀이 어떤 방향성을 가지고 문제를 해결해 나갔는지 그 전반적인 궤적을 담았습니다.

보행, 조작, 네비게이션이 각각 따로 동작하는 것과 하나의 로봇에서 동시에 맞물려 돌아가는 것은 완전히 다른 문제입니다. 각 모듈이 독립적으로는 잘 작동하다가도, 함께 돌리면 타이밍이 어긋나거나 하나의 연산이 다른 모듈의 응답 속도를 잡아먹어 비틀거리면서 보행하는 경우가 생겼습니다. 그뿐만 아니라 학습된 모델들을 서로 전환할 때는 초기 자세와 함께 모터의 Kp, Kd 와 같은 제어 파라미터들을 맞물려 고려해야 합니다. 여러 제어 시스템이 동시에 돌아가다 충돌이 나서 진동하는 일은 흔했습니다.
통합 단계에서는 단순한 버그 수정을 넘어 각 모듈 간의 우선순위와 리소스 배분을 다시 설계하는 작업이 필요했습니다. 젠피가 대화를 하면서 걷고, 걸으면서 주변을 인식하고, 목적지에 도착하면 물건을 집는 일련의 흐름이 자연스럽게 이어지려면, 각 컴포넌트가 연산량을 최소로 하면서 서로를 방해하지 않고 협력해야 했습니다.
로봇의 상태 관리에는 흔히 FSM(Finite State Machine)을 많이 사용합니다. 휴머노이드처럼 여러 능력을 동시에 가진 로봇은 매 순간 “지금 무엇을 하는 상태인지” 가 명확해야 합니다. 보행 중인지, 멈춰 서서 물건을 집는 중인지, 대화에 응답하는 중인지에 따라 활성화되어야 할 모델과 제어 파라미터가 전부 달라지기 때문입니다. FSM 은 로봇이 가질 수 있는 상태들(예시로 Idle, Move, Stop, Pick 등)과, 어떤 조건에서 한 상태에서 다음 상태로 넘어갈 수 있는지를 명시적으로 정의해두는 구조입니다.
FSM 과 같은 모듈이 없으면 어떤 일이 벌어질까요? 여러 조작 정책이 실행되면 각각 개별적인 관절 명령을 내려 서로 부딪히고, 앞서 말한 진동이 그대로 재현됩니다. 이전 태스크를 수행하는 도중에 사람이 새 명령을 내리면, 로봇이 물건을 집다 말고 엉뚱한 목적지로 움직여버릴 수도 있습니다. 반대로 FSM 이 상태를 한번에 하나만 활성화하도록 보장하면, 각 모듈은 자기 차례에만 로봇을 제어합니다. 상태가 전환되는 순간에는 이전 상태의 마지막 자세를 다음 상태의 초기 자세로 매끄럽게 인계하고, 그에 맞춰 제어 파라미터를 함께 바꿔주면서 전환 충격을 줄입니다. 젠피가 걷다가 자연스럽게 멈춰 서서 약통을 집고 다시 환자에게 건네는 일련의 흐름은, 결국 이 상태 전환들이 빈틈없이 이어진 결과인 셈입니다.
지난 3개월 동안 저희를 시험에 들게 한 것은 알고리즘뿐만이 아니었습니다. 하드웨어의 물리적인 변수 역시 만만치 않은 도전 과제였습니다. 예기치 못한 고장이 나거나 일부 부품에 문제가 생겼을 때는 대체 부품을 확보하거나 기존 메커니즘을 유연하게 변경해 시연의 완성도를 확보하는 등 수많은 시행착오를 거쳐야 했습니다.
경험해 보지 못한 이슈를 끊임 없이 극복하고, 단 3개월 만에 네 가지 복합 기능을 한 대의 로봇에 완벽히 통합할 수 있었던 원동력은 결국 팀워크에 있었습니다. 매 순간 마주한 고비마다 각자의 전문성을 발휘하고 긴밀하게 협업한 끝에, 저희 팀은 단순한 기술 구현을 넘어 '함께 문제를 해결하는 방식'을 배우며 한 단계 더 성장할 수 있었습니다.

이번 엑스포에서 선보인 약통 집기와 시니어 돌봄 대화는 제논 피지컬 AI 여정의 첫 줄에 불과합니다. 젠피는 지금도 보행의 안정성을 끌어올리고 조작의 정밀도를 높이며, 실제 시니어케어가 필요한 환경의 복잡성을 고려하여 전체적인 통합 안정성을 다듬어 나가고 있습니다.
특히 각 기능이 모듈화되어 있는 현재의 방식에서 한 걸음 더 나아가, 이들을 하나의 제어 정책으로 통합하는 방향을 준비하고 있습니다. 이를 통해 더 자연스러운 모션을 생성하고, 기존에 따로 학습되지 않은 다양한 기능까지 하나의 제어 정책으로 안정적으로 수행할 수 있게 만드는 것이 목표입니다.
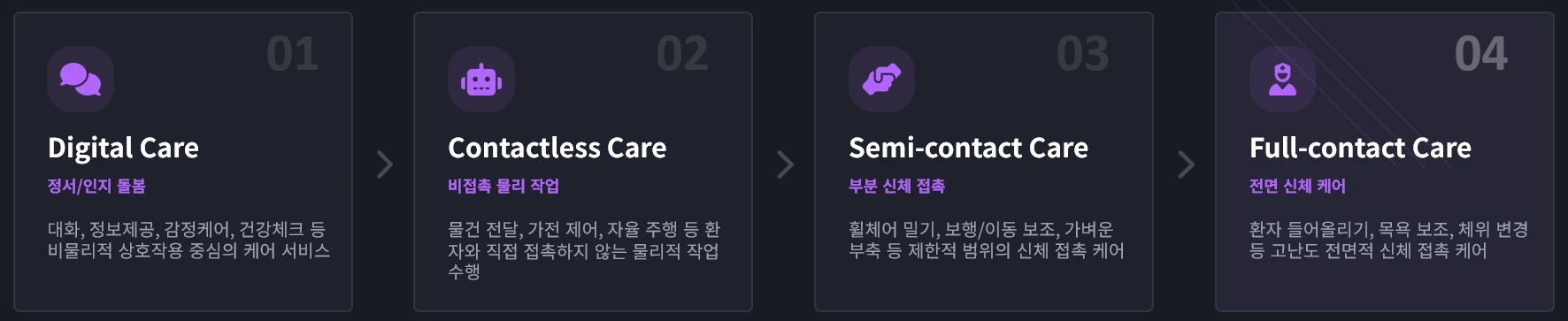
나아가 사람의 신체와 간접적으로 맞닿는 Semi-contact Care 단계로의 진입도 준비하고 있습니다. 바닥에 흩어진 물건들을 정리하고, 빨래통을 수거하여 세탁기 앞으로 옮기고, 음료나 물을 사람에게 건네는 기능처럼요. 화면 밖으로 나온 AI가 현실 공간에서 사람을 돕기까지, 그 사이를 메우는 수많은 엔지니어링의 순간들을 앞으로도 이 시리즈에서 주기적으로 공유하겠습니다.